|
Курсовая работа: Створення мікропроцесорної системи обробки інформаціїКурсовая работа: Створення мікропроцесорної системи обробки інформаціїСодержание Вступ 1. Розробка структурної схеми системи 2. Розробка І опис принципової схеми системи 2.1 Розробка мікропроцесорного блоку 2.2 Розробка блоку пам’яті (ОЗП і ПЗП) 2.3 Інтервальний таймер 2.4 Аналого-цифровий перетворювач (АЦП) 2.5 Контролер клавіатури і індикації 2.6 Адаптер послідовного інтерфейсу Intel 8251 Висновки ВступСьогодні розвиток комп’ютерних технологій проходить досить стрімко. Більшість цифрових систем будується на мікропроцесорах або на мікроконтролерах. Управління різними технологічними процесами проходить за допомогою мікропроцесорних систем або технологічних операцій. Дані системи універсальні, так як вони мають дуже високу швидкодію та достатню розрядність для обробки інформації на виробництві. Мікропроцесор являє собою функціонально закінчений пристрій, що складається із однієї або декількох програмно керуємих ВІС, та слугує для виконання операцій з обробки нформації та керування обчислювальним процесом. До числа внутрішніх схем мікропроцесора відносяться багаторозрядні регістри, рівнобіжні тракти даних, буфери для підключення зовнішніх пристроїв, багатофункціональні схеми, логічн схеми синхронізації і керування. Центральне місце в структурі мікропроцесорних приладів займає мікропроцесор, який викону арифметичні та логічні операції над даними, програмне керування процесом обробки інформації, а також організує взаємодію усіх пристроїв, що входять до складу системи. Багатофункціональн схеми призначені для реалізації простих арифметичних і логічних дій над двійковими числами, що знаходяться в регістрах процесора, і пересилок даних як усередині процесора, так і між ним і зовнішніми пристроями. Розвиток нтегральної технології і схемотехніки цифрових електронних схем призвів до появи інтегральних мікросхем із великою і дуже великою ступенями інтеграції (ВІС ДВІС), що містять на однім кристалі (в однім корпусі) декілька десятків тисяч, а в останніх розробках сотні тисяч елементарних транзисторів. На основ таких схем створюються мікропроцесори функціонально закінчені, що управляються збереженою в пам'яті програмою, це (здебільшого малорозрядні) пристро опрацювання цифрової інформації, виконані у виді однієї або декількох ВІС або ДВІС. Мікропроцесорн засоби використовуються у виді мікропроцесорних комплектів інтегральних мікросхем, що мають єдине конструктивно-технологічне виконання і призначених для спільного застосування. Мікропроцесорний комплект крім самого мікропроцесора містить мікросхеми, що підтримують функціонування мікропроцесора і розширюють його логічні можливості. Робота мікропроцесора складається з наступних кроків: спочатку вибирається команда, потім логічна схема її декодує, після чого здійснюється виконання цієї команди. Також відбувається обмін інформацією з зовнішніми пристроями, які приєднані до мікропроцесора. Завданням ц курсової роботи є створення мікропроцесорної системи обробки інформації на основі мікроконтролера ATmega128 та інших мікросхем, згідно варіанту. 1. Розробка структурної схеми системиСтруктурна схема даної системи повинна мати наступні компоненти: мікроконтролер, ОЗУ, ПЗУ, АЦП, контролер клавіатури й індикації, клавіатуру та індикацію, iнтервальний таймер (згідно із завдання). Увесь масив пам’яті поділено на дві області: ОЗП і ПЗП. В ПЗП зберігаються програми вводу виводу інформації. В ОЗП розміщуються дані, які необхідно тимчасово зберігати у процесі обробки програми. Для забезпечення тимчасових затримок, отримання одиничних імпульсів заданої тривалості та генерації послідовностей імпульсів служить програмований iнтервальний таймер (Т).
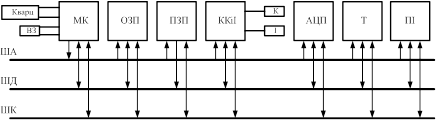
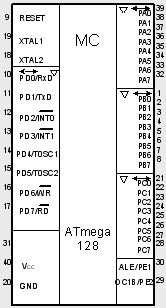
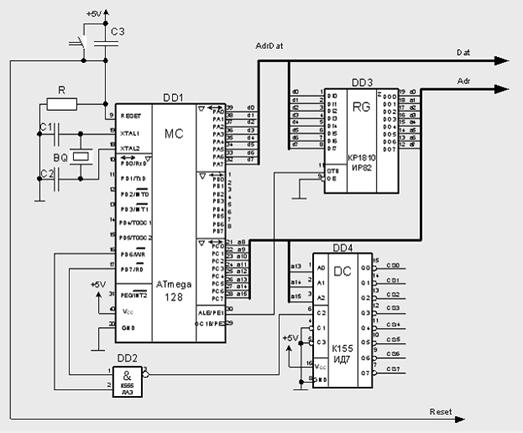
Рис.1. - Структурна схема пристрою. ОЗП - оперативний запам'ятовувальний пристрій ПЗП - постійний запам'ятовувальний пристрій МК - мікроконтролер ККіІ - контролер ндикації й клавіатури ША - шина адреси ШД - шина даних ШК - шина керування АЦП - аналого-цифровий перетворювач T - таймер ВЗ - вузол збросу К - клавіатура І - індикатор ПІ - послідовний нтерфейс 2. Розробка І опис принципової схеми системиРозробка принципової схеми буде проводитись кількома етапами. Буде розроблено функціональні блоки які треба буде зв`язати між собою шинами. Вибір елементів буде проводитись згідно завданню. Для побудови структурної схеми необхідно точно визначити необхідні вузли системи і зв'язку між ними. 2.1 Розробка мікропроцесорного блокуОсновний елемент системи - мікроконтролер ATmega128, ATmega128L 8-розрядний AVR-мікроконтролер з внутрісистемно програмованою флэш-пам'яттю ємкістю 128 кбайт Відмітн особливості: Високопродуктивний, малопотужний 8-розрядний AVR-мікроконтролер Розвинена RISC-архітектура. 133 могутніх нструкцій, більшість з яких виконуються за один машинний цикл. 32 8-разр. регістрів загального призначення + регістри управління вбудованою периферією. Повністю статична робота. Продуктивність до 16 млн. операцій в секунду при тактовій частоті 16 Мгц Вбудований умножаючий пристрій виконує множення за 2 машинних циклу. Незалежна пам'ять програм і даних. Зносостійкість 128-ми кбайт внутрісистемно перепрограмміруємой флэш-пам'яті: 1000 циклів запис/стирання. Опціональний завантажувальний сектор з окремим програмованим захистом. Внутрішньосистемне програмування вбудованою завантажувальною програмою. Гарантована двухоперационность: можливість читання під час запису Зносостійкість 4 кбайт ЕСППЗУ: 100000 циклів запис/стирання Вбудоване статичне ОЗУ ємкістю 4 кбайт Опціональна можливість адресації зовнішньої пам'яті розміром до 64 кбайт. Програмований захист коду програми. Інтерфейс SPI для внутрішньосистемного програмування. Інтерфейс JTAG (сумісність з стандартом IEEE 1149.1). Граничне сканування відповідно до стандарту JTAG. Обширна підтримка функцій вбудованої відладки. Програмування флэш-пам'яті, ЕСППЗУ, біт конфігурації і захисту через інтерфейс JTAG. Відмітн особливості периферійних пристроїв. Два 8-разр. таймера-лічильника з роздільними переддільниками і режимами порівняння. Два розширених 16-разр. таймера-лічильника з окремими переддільниками, режимами порівняння режимами захоплення. Лічильник реального часу з окремим генератором. Два 8-разр. каналів ШИМ. 6 каналів ШИМ з програмованим дозволом від 2 до 16 розрядів Модулятор виходів порівняння. 8 мультіплексованих каналів 10-розрядного аналогово-цифрового перетворення. 8 несиметричних каналів. 7 диференціальних каналів 2 диференціальних каналу з вибірковим посиленням з 1x, 10x і 200x Двухпроводно послідовний інтерфейс, орієнтований не передачу даних в байтному форматі Два канали програмованих послідовних УСАПП. Послідовний нтерфейс SPI з підтримкою режимів ведучий/підлеглий. Програмований сторожовий таймер з вбудованим генератором. Вбудований аналоговий компаратор. Спеціальн можливості мікро контролера. Скидання при подачі живлення і програмована схема скидання при зниженні напруги живлення. Вбудований RC-генератор, що калібрується. Зовнішн внутрішні джерела переривань. Шість режимів зниження енергоспоживання: холостий хід (Idle), зменшення шумів АЦП, економічний (Power-save), виключення (Power-down), черговий (Standby) розширений черговий (Extended Standby) Програмний вибір тактової частоти Конфігураційний біт для перекладу в режим сумісності з ATmega103 Загальне виключення підтягаючих резисторів на всіх лініях портів введення-виводу Уведення-виведення корпуси 53 програмуєм лінії введення-виводу 64-выв. корпус TQFP Робоча напруга 2.7 - 5.5В для ATmega128L 4.5 - 5.5В для ATmega128 Градації по швидкодії 0 - 8 Мгц для ATmega128L 0 - 16 Мгц для ATmega128 Короткий огляд: ATmega128 - малопотужний 8-разр. КМОП мікроконтролер, заснований на розширеній RISC-архітектурі AVR. За рахунок виконання більшості інструкцій за один машинний цикл ATmega128 досягає продуктивності 1 млн. операцій в секунду/МГц, що дозволяє проектувальникам систем оптимізувати співвідношення енергоспоживання і швидкодії. Ядро AVR поєдну багатий набір інструкцій з 32 універсальними робочими регістрами. Все 32 регістри безпосередньо підключено до арифметико-логічного пристрою (АЛУ), який дозволяє вказати два різні регістри в одній інструкції і виконати її за один цикл. Дана архітектура володіє більшою ефективністю коду за рахунок досягнення продуктивності в 10 разів вище в порівнянні із звичайними CISC-мікроконтролерами. ATmega128 містить наступні елементи: 128 кбайт внутрісистемно програмованої флэш-пам'яті з підтримкою читання під час запису, 4 кбайт ЕСППЗУ, 4 кбайт статичного ОЗУ, 53 лінії універсального введення-виводу, 32 універсальні робочі регістра, лічильник реального часу (RTC), чотири гнучкі таймери-лічильники з режимами порівняння і ШИМ, 2 УСАПП, двухпроводний послідовний інтерфейс орієнтований на передачу байт, 8-канальний 10-разр. АЦП з опціональним диференціальним входом з програмованим коефіцієнтом посилення, програмований сторожовий таймер з внутрішнім генератором, послідовний порт SPI, випробувальний інтерфейс JTAG сумісний із стандартом IEEE 1149.1, який також використовується для доступу до вбудованої системи відладці і для програмування, а також шість програмно вибираних режимів зменшення потужності. Режим холостого ходу (Idle) зупиня ЦПУ, але при цьому підтримуючи роботу статичного ОЗУ, таймерів-лічильників, SPI-порту і системи переривань. Режим виключення (Powerdown) дозволяє зберегти вміст регістрів, при зупиненому генераторі і виключенні вбудованих функцій до наступного переривання або апаратного скидання. У економічному режимі (Power-save) асинхронний таймер продовжує роботу, дозволяючи користувачеві зберегти функцію відліку часу в той час, коли решта частини контроллера знаходиться в стані сну. Режим зниження шумів АЦП (ADC Noise Reduction) зупиняє ЦПУ і всі модул введення-виводу, окрім асинхронного таймера і АЦП для мінімізації імпульсних шумів в процесі перетворення АЦП. У черговому режимі (Standby) кварцевый/резонаторный генератор продовжують роботу, а решта частини мікроконтролера знаходиться в режимі сну. Даний режим характеризується малою споживаною потужністю, але при цьому дозволяє досягти найшвидшого повернення в робочий режим. У розширеному черговому режимі (Extended Standby) основний генератор і асинхронний таймер продовжують працювати. Мікроконтролер проводиться за технологією високощільної незалежної пам'яті компанії Atmel. Вбудована внутрісистемно програмована флэш-пам'ять дозволяє перепрограмувати пам'ять програм безпосередньо усередині системи через послідовний інтерфейс SPI за допомогою простого програматора або за допомогою автономної програми в завантажувальному секторі. Завантажувальна програма може використовувати будь-який інтерфейс для завантаження прикладної програми у флэш-пам'ять. Програма в завантажувальному секторі продовжує роботу в процесі оновлення прикладно секції флэш-пам'яті, тим самим підтримуючи двухоперационность: читання під час запису. За рахунок поєднання 8-разр. RISC ЦПУ з внутрісистемно самопрограммируемой флэш-пам'яттю в одній мікросхемі ATmega128 є могутнім мікроконтролером, що дозволяє досягти високого ступеня гнучкості і ефективно вартості при проектуванні більшості додатків вбудованого управління. ATmega128 підтримується повним набором програмних і апаратних засобів для проектування, в т. ч.: Сі-компілятори, макроасемблери, програмні отладчики/симуляторы, внутрішньосистемні емулятори і оцінні набори. Умовне графічне позначення мікроконтроллера ATmega128 наведено на рис.2.
Рис.2 Умовне графічне позначення мікроконтроллера ATmega128 Найменування виводів ATmega128:
Електричн характеристики Гранично-допустим параметри
Статичн характеристики
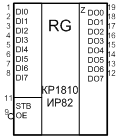
Завдяки тому, що шина даних і адреси в МК ATmega128 сполучені й мають поділ тільки в часі, то для їхнього поділу будемо використати регістр із третім станом К1810ИР82 для зберігання адреси. Восьмирозрядн буферні регістри К1810ИР82 використовуються для організації запам'ятовуючих пристроїв, портів уводу-виводу, мультиплексорів і т.п. Буферні регістри складаються із восьми тригерів Т з виходними схемами 5Ш з трьома станами. Формувач має дв групи - А і В виводів, а також два керуючих виводи - SТB та ОЕ. Дозвіл передач залежить від рівня сигналу на виводі ОЕ, а напрямок передачі визначається рівнем сигналу на виводі Т. Електричн параметри К1830ИР82. Вхідний струм низького рівня не більше 0,2 мА Вхідний струм високого рівня не більше 50 мкА Вихідна напруга низького рівня не більше 0,45 В при струмі 32мА Вихідна напруга високого рівня не меньше 2,4 В при струмі 1мА
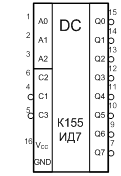
Рис.3 - Умовне графічне позначення К1830ИР82 Для створення адресації зовнішніх пристроїв використовується дешифратор 3-8. На входи якого потрапляють молодші розряди адреси, а на виході установлюються сигнали вибору кристалу мікросхеми.
Рис.4 - Умовне графічне позначення К155ИД7 В цій мікро ЄОМ присутн пять зовнішніх пристроїв. Таким чином селектор адреси повинен бути більше ніж на пять розрядів, а також він повинен мати інверсні виходи для керування виборкою кристалів які також інверсні. Вище приведений (SN74138N) повністю задовольняє цим вимогам. Розробка фізичних адрес зовнішніх пристроїв:
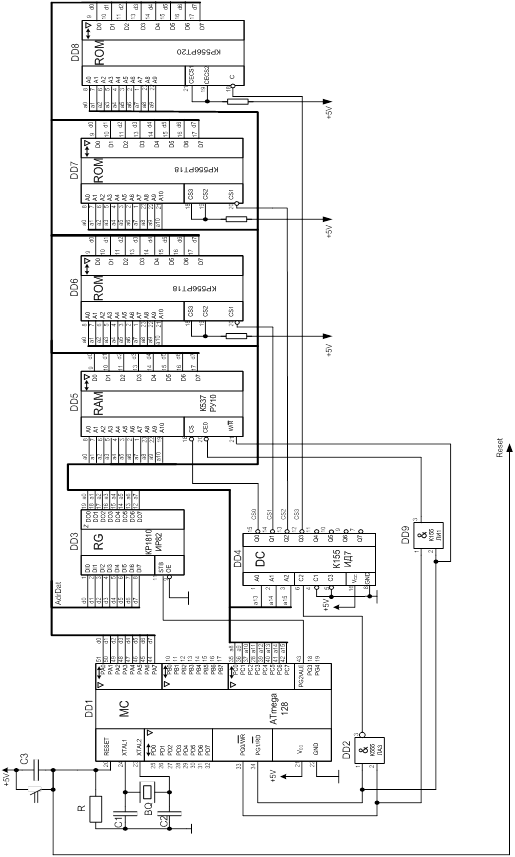
Рис.5 - Схема підключення процесорного блоку 2.2 Розробка блоку пам’яті (ОЗП і ПЗП)Ісходні дані: Кількість комірок зовнішнього ОЗП NОЗУ - 2К×8 Вхідні струми: при логічному 0, IIL - 1,6 мА при логічній 1, IIH - 0,1 мА Вхідна ємкість логічних схем навантаження, СI - 5 пФ Монтажні ємкост усіх ланцюгів (См = 20 пФ). Згідно завдання кількість комірок ОЗП складає NОЗУ. Розрядність ОЗП nОЗУ повинна відповідати розрядності обробки даних ЦП. Інформаційна мкість СОЗУ визначається по формулі:
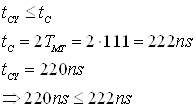
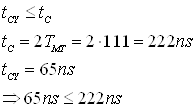
У якост мікросхеми ОЗП виберемо К537РУ10. Необхідна швидкодія ОЗП визначається по тимчасовим діаграмам ЦП. Для МК ATmega128 тривалість циклу запису (зчитування) tС равно 2ТМТ, де ТМТ - тривалість машинного такту. При частот кварцевого резонатора fтг = 9 МГц тривалість tС дорівнює:
Тривалість циклу мікросхеми пам’яті tcy повинна задовольняти нерівності:
Мікросхему ОЗП виберемо К537РУ10, тому що вона ідеально підходить і не створює збитковості для даного випадку. Для цієї мікросхеми пам’яті ємкість 2К, а розрядність слова 8 біт:
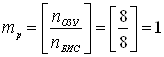
Розрахуємо число ВІС ОЗП в ряду матриці:
де nБИС - розрядність обраної мікросхеми пам’яті. Визначимо число розрядів стовбців матриці:
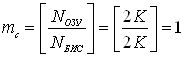
де NБИС - кількість комірок обраної мікросхеми пам’яті. Загальна кількість ВІС ОЗП дорівнює:
Таким чином, кількість корпусів ОЗП дорівнює 1. Визначимо струмове IDL и IDH і ємкістне СD навантаження для схем вводу інформації в ОЗП по формулам: IDL = mc * IIDL = 1 * 1,6 = 1,6 мА IDH = mc * IIDH = 1 * 0,1 = 0,1 мА CD = mc * CID + Cm = 1 * 5 + 20 = 25 пФ де IIDL, IIDH - вхідні струми логічного 0 і логічної 1 по інформаційним ланцюгам обраної ВІС ОЗП. CID - вхідна ємкість по інформаційному входу ВІС ОЗП. Визначимо стум навантаження і ємкістне навантаження для схем вводу адреси по ланцюгам адресу ВІС ОЗП по формулам: IAL = m * IIAL = 1 * 1,6 = 1,6 мА IAH = m * IIAH = 1 * 0,1 = 0,1 мА CA = m * CIA + Cm = 1 * 5 + 20 = 25 пФ де IIАL, IIAH - вхідні токи логічного 0 і логічної 1 по ланцюгам адресу обраної ВІС ОЗП. CIА - вхідна ємкість по входу адресу ВІС ОЗП. Визначимо струми навантаження ICSL, ICSH і величину ємкісного навантаження СCS по ланцюгам вибору мікросхем (CS) по формулам: ICSL = mp * IICSL = 1 * 1,6 = 1,6 мА ICSH = mp * IICSH = 1 * 0,1 = 0,1 мА CCS = mp * CICS + Cm = 1 * 5 + 20 = 25 пФ де IICSL, IICSH - вхідні струми логічного 0 і логічної 1 по ланцюгам вибору (CS) ВІС ОЗП. CСS - вхідна ємкість по ланцюгам вибору мікросхем (CS) ВІС ОЗП. Значення ICSL, ICSH и CCS не повинні перевищувати максимально допустим значення для обраних мікросхем, що забезпечують вибір ВІС ОЗП.
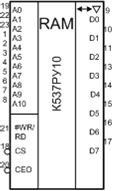
Рис.6 Умовно графічне позначення ОЗП К537РУ10 Найменування виводів: A0 ÷ A10 - адресні входи. W/R - запис/зчитування. CS1 - chip select, чіп вибору. CEO - виход дозволу. D0 ÷ D7 - шина даних вводу/виводу. ОЗП представля собою статичний асинхронний оперативно запом’ятовуючий пристрій. Режими роботи ОЗП:
Технологічні та електричні характеристики К537РУ10: Технологія - КМОП Організація - 2К×8 Час виборки, ns - не більш 220 Напруга живлення, V - 5 Струм живлення, мА у режимі звернення - 30 у режим зберігання - 1-2 Вхідна напруга, V при логічному 0 - min 0 - max 0,4 при логічній 1 - min 0,9Ucc - max 0,5 Вихідна напруга, V при логічному 0 - min 0 - max 0,4 при логічній 1 - min 2,4 - max 0,4 Вихід - 3 с. Діапазон робочих температур, ºС - - 10 - +70 Розрахуємо ПЗП: Оскільки по
завданню необхідно створити ПЗП емкість 5К Початкові дані для
мікросхеми КР556РТ20 1К Кількість комірок зовнішнього ПЗП NОЗУ - 1К×8 Вхідні струми: при логічному 0, IIL - 0,25 мА при логічній 1, IIH - 0,04 мА Вхідна ємкість логічних схем навантаження, СI - 5 пФ Монтажні ємкост усіх ланцюгов (См = 20 пФ). Згідно завдання кількість комірок ПЗП складає NОЗУ. Розрядність ПЗП nОЗУ повинна відповідати розрядності обробки даних ЦП. Інформаційна мкість СОЗУ визначається по формулі:
Необхідна швидкодія ПЗП визначається по тимчасовим діаграмам ЦП. Для МК ATmega128 тривалість циклу запису (зчитування) tС равно 2ТМТ, де ТМТ - тривалість машинного такту. При частот кварцевого резонатора fтг = 9 МГц тривалість tС дорівнює:
Тривалість циклу мікросхеми пам’яті tcy повинна задовольняти нерівності:
У якост мікросхеми ПЗП виберемо КР556РТ20, тому що вона ідеально підходить і не створю збитковості для даного випадку. Для даної мікросхеми пам’яті ємкість 1К, а розрядність слова 8 біт:
Розрахуємо число ВІС ПЗП в ряду матриці:
де nБИС - розрядність обраної мікросхеми пам’яті. Визначимо число розрядів стовбців матриці:
де NБИС - кількість комірок обраної мікросхеми пам’яті. Загальна кількість ВІС ПЗП дорівнює:
Таким чином, кількість корпусів ПЗП дорівнює 1. Визначимо стум навантаження і ємкістне навантаження для схем вводу адреси по ланцюгам адресу ВІС ПЗП по формулам: IAL = m * IIAL = 1 * 0,25 = 0,25 мА IAH = m * IIAH = 1 * 0,04 = 0,04 мА CA = m * CIA + Cm = 1 * 5 + 20 = 25 пФ де IIАL, IIAH - вхідні токи логічного 0 і логічної 1 по ланцюгам адресу обраної ВІС ПЗП. CIА - вхідна ємкість по входу адресу ВІС ПЗП. Визначимо струми навантаження ICSL, ICSH і величину ємкісного навантаження СCS по ланцюгам вибору мікросхем (CS) по формулам: ICSL = mp * IICSL = 1 * 0,25 = 0,25 мА ICSH = mp * IICSH = 1 * 0,04 = 0,04 мА CCS = mp * CICS + Cm = 1 * 5 + 20 = 25 пФ де IICSL, IICSH - вхідні струми логічного 0 і логічної 1 по ланцюгам вибору (CS) ВІС ПЗП. CСS - вхідна ємкість по ланцюгам вибору мікросхем (CS) ВІС ПЗП. Враховуючи, що на відміну від ОЗП інформація з ПЗП тільки зчитується, то необхідно визначити струми навантаження і ємкість навантаження на інформаційні виходи ВІС ПЗП по формулам: IQL = mР * IIL = 1 * 0,25 = 0,25 мА IQH = mР * IIH = 1 * 0,04 = 0,04 мА CQ = mC * CQO + mР *CI + Cm = 1 * 5 + 1 * 5 + 20 = 30 пФ де IQL, IQH - вхідні струми логічного 0 і логічної 1 мікросхем навантаження ВІС ПЗП, CQO - вихідна ємкість одного інформаційного виходу ВІС ПЗП, CI - вхідна ємкість мікросхем навантаження ВІС ПЗП. Отримані значення струмів не повинні перевищувати граничні значення для обраних мікросхем пам’яті.
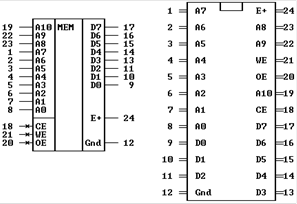
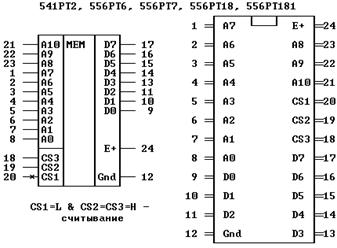
Рис.7 Умовно графічне позначення ПЗП КР556РТ20 Найменування виводів: A0 ÷ A9 - адресні входи. D0 ÷ D7 - шина даних вводу/виводу. CECS, CECS1 - вибір мікросхеми Технологічні та електричні характеристики КР556РТ20: Технологія - ТТЛШ Організація - 1К×8 Час виборки, ns - не більш 65 Напруга живлення, V - 5 Струм живлення, мА - 180 мА Вхідна напруга, V при логічному 0 - min 2,4 - max 0,5 при логічній 1 - min 2,4 - max 0,5 Вихідна напруга, V при логічному 0 - min 2,4 - max 0,5 при логічній 1 - min 2,4 - max 0,5 Вихід - 3 с. Потужність споживання, mW - 875 Діапазон робочих температур, ºС - - 10 - +70 Початкові дані для
мікросхеми КР556РТ18 2К Кількість комірок зовнішнього ПЗП NОЗУ - 4К×8 Вхідні струми: при логічному 0, IIL - 0,25 мА при логічній 1, IIH - 0,04 мА Вхідна ємкість логічних схем навантаження, СI - 5 пФ Монтажні ємкост усіх ланцюгів (См = 20 пФ). Згідно завдання кількість комірок ПЗП складає NОЗУ. Розрядність ПЗП nОЗУ повинна відповідати розрядності обробки даних ЦП. Інформаційна ємкість СОЗУ визначається по формулі:
Необхідна швидкодія ПЗП визначається по тимчасовим діаграмам ЦП. Для МК ATmega128 тривалість циклу запису (зчитування) tС равно 2ТМТ, де ТМТ - тривалість машинного такту. При частоті кварцевого резонатора fтг = 9 МГц тривалість tС дорівнює:
Тривалість циклу мікросхеми пам’яті tcy повинна задовольняти нерівності:
У якост мікросхеми ПЗП виберемо КР556РТ20, тому що вона ідеально підходить і не створю збитковості для даного випадку. Для даної мікросхеми пам’яті ємкість 1К, а розрядність слова 8 біт:
Розрахуємо число ВІС ПЗП в ряду матриці:
де nБИС - розрядність обраної мікросхеми пам’яті. Визначимо число розрядів стовбців матриці:
де NБИС - кількість комірок обраної мікросхеми пам’яті. Загальна кількість ВІС ПЗП дорівнює:
Таким чином, кількість корпусів ПЗП дорівнює 2. Визначимо стум навантаження і ємкістне навантаження для схем вводу адреси по ланцюгам адресу ВІС ПЗП по формулам: IAL = m * IIAL = 2 * 0,25 = 0,50 мА, IAH = m * IIAH = 2 * 0,04 = 0,08 мА CA = m * CIA + Cm = 2 * 5 + 20 = 30 пФ де IIАL, IIAH - вхідні токи логічного 0 і логічної 1 по ланцюгам адресу обраної ВІС ПЗП. CIА - вхідна мкість по входу адресу ВІС ПЗП. Визначимо струми навантаження ICSL, ICSH і величину ємкісного навантаження СCS по ланцюгам вибору мікросхем (CS) по формулам: ICSL = mp * IICSL = 1 * 0,25 = 0,25 мА ICSH = mp * IICSH = 1 * 0,04 = 0,04 мА CCS = mp * CICS + Cm = 1 * 5 + 20 = 25 пФ де IICSL, IICSH - вхідні струми логічного 0 і логічної 1 по ланцюгам вибору (CS) ВІС ПЗП. CСS - вхідна ємкість по ланцюгам вибору мікросхем (CS) ВІС ПЗП. Враховуючи, що на відміну від ОЗП інформація з ПЗП тільки зчитується, то необхідно визначити струми навантаження і ємкість навантаження на інформаційні виходи ВІС ПЗП по формулам: IQL = mР * IIL = 1 * 0,25 = 0,25 мА IQH = mР * IIH = 1 * 0,04 = 0,04 мА CQ = mC * CQO + mР *CI + Cm = 2 * 5 + 1 * 5 + 20 = 35 пФ де IQL, IQH - вхідні струми логічного 0 і логічної 1 мікросхем навантаження ВІС ПЗП, CQO - вихідна ємкість одного інформаційного виходу ВІС ПЗП, CI - вхідна ємкість мікросхем навантаження ВІС ПЗП. Отримані значення струмів не повинні перевищувати граничні значення для обраних мікросхем пам’яті.
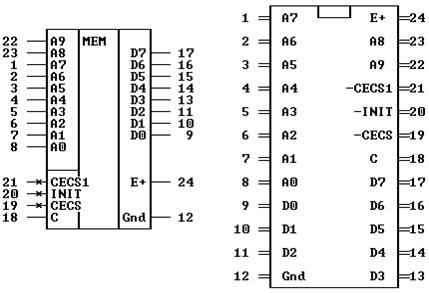
Рис.8 Умовно графічне позначення ПЗП КР556РТ18 Найменування виводів: A0 ÷ A10 - адресні входи. D0 ÷ D7 - шина даних вводу/виводу. CS1 ÷ СS3 - вибір мікросхеми Технологічні та електричні характеристики КР556РТ20: Технологія - ТТЛШ Організація - 2К×8 Час виборки, ns - не більш 60 Напруга живлення, V - 5 Струм живлення, мА - 180 мА Вхідна напруга, V при логічному 0 - min 2,4 - max 0,5 при логічній 1 - min 2,4 - max 0,5 Вихідна напруга, V при логічному 0 - min 2,4 - max 0,5 при логічній 1 - min 2,4 - max 0,5 Вихід - 3 с. Потужність споживання, mW - 875 Діапазон робочих температур, ºС - - 10 - +70
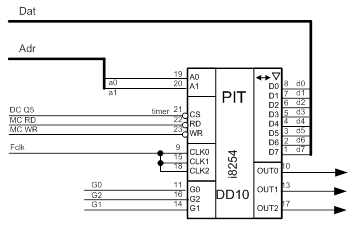
Рис.9 - Схема підключення процесорного блоку і пам’яті 2.3 Інтервальний таймерОдним з елементів, обумовлених завданням, є інтервальний таймер i8254. Таймер призначений для формування затримок послідовності імпульсів, формування одиночних імпульсів заданої тривалості, формування стробуємих імпульсів із програмованою затримкою. Виконаний по n-МОП технології.
Рис.10 - Умовне графічне позначення таймеру i8254 D0 - D7 - двонаправлена шина даних з високоімпедансним станом. А0 - А1 - розряди шини даних, визначають регістр, що буде адресуватися: А1А0 = 00 - адреса каналу 0; А1А0 = 01 - адреса каналу 1; А1А0 = 10 - адреси каналу 2; А1А0 = 11 - адреса регістра керуючого слова
CLK0 - CLK2 - вхід дозволу подачі імпульсу від зовнішнього джерела GATE0 - GATE2 - вхід дозволу подачі імпульсу сlk на таймер/лічильник OUT0 - OUT2 - вихід таймерів/лічильників Вхідні сигнали CLK0 - CLK2 подаються через схеми із зовнішніми керуючими входами GATE0 - GATE2. Кожен лічильник має вихідний сигнал OUT. Інші вузли схеми призначені для установки режиму й реалізації інтерфейсу із системною шиною. Для функціонування таймера мікроконтролер повинен завантажити керуючі слова, значення яких позначають режим кожного лічильника, і необхідні початкові значення. У завданн нам дані параметри для програмування таймера, тому ми проініціализуємо його в розділі розробки програм ініціалізації. Електричн параметри i8254: 1. Напруга живлення - 5 В 2. Вихідна напруга: високого рівня - 2,4 В низькі рівні - 0,5 В 3. Вихідний струм високого рівня - 1 мА 4. Вихідний струм низького рівня - 5 мА 5. Вхідний струм високого рівня - 30 мкА 6. Вхідний струм низького рівня - 30 мкА
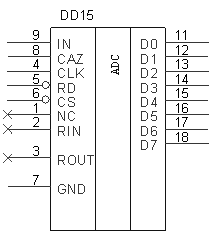
Рис.11 - Схема підключення таймера i8254 2.4 Аналого-цифровий перетворювач (АЦП)Згідно із завданням, у нашій МПС повинен бути використаний аналого-цифровий перетворювач. Це пристрій, який перетворює аналоговий сигнал у цифровий код. Цей код повинен потрапляти на всі пристрої, таким чином, АЦП підключається до загальної шини. Варіантом передбачено використання 12ти розрядного швидко-діючого АЦП послідовного наближення, працюючого із ТТЛ-рівнями. Так як дана мікросхема не має окремого блоку цифрового керування, то включення АЦП до шини даних проводиться завдяки регістру К1810ИР82. Нижче наведено УГП MAX201В (іноземний аналог).
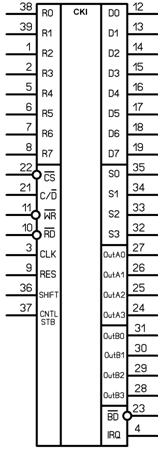
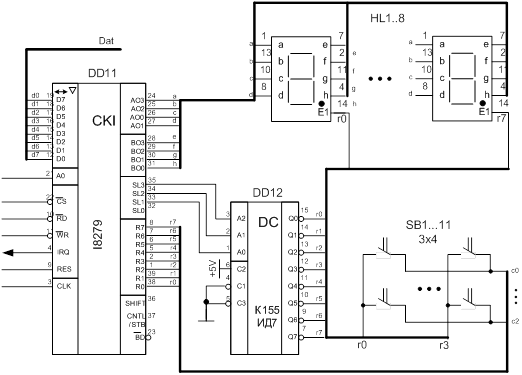
Рис.12 - Умовно графічне позначення MAX201B Основні електричн параметри мікросхеми приведені нижче: Напруга живлення: +5±10%В, - 15±15% Максимальний вхідний струм лог.1: 100мкА Максимальний вхідний струм лог.0: 100мкА Мінімальна вхідна напруга лог.1: 2В Максимальна вхідна напруга лог.0: 0,8В Максимальний вихідний струм лог.1: 0,5мА Максимальний вихідний струм лог.0: 3,2мА Мінімальна вихідна напруга лог.1: 2,4В Максимальна вихідна напруга лог.0: 0,4В Вхідна ємність по всіх виводах (на частоті 1МГц): 6пФ Вихідна ємність (на частоті 1МГц): 5пФ Похибка перетворення: ±1/2ОМР Час перетворення: 20мкС Струм живлення: 15мА Споживана потужність: 800мВт 2.5 Контролер клавіатури і індикаціїДля керування індикацією та сканування клавіатури використовується спеціалізована мікросхема i8279. Вона являє собою контролер клавіатури та індикації. Мікросхема має внутрішній ОЗП клавіатури та індикації, може працювати у декількох режимах і дозволяє керувати восьми - або шістнадцятирозрядною індикацією та опитувати до 128 клавіш або дискретних датчиків. Умовне графічне позначення мікросхеми приведене на рис.14.
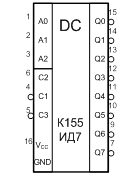
Рис.13- Умовне-графічне позначення мікросхеми i8279 Внутрішня адресація виробляється по входу A0, тому на цей вхід потрібно подати сигнал з адресної шини. Обмін даними йде по шині даних. Входи RL0-RL7 мікросхеми служать для зчитування стану клавіш клавіатури; виходи OutA3-OutA0, OutB0-OutB3 підключаються до індикаторів; виходи S0-S3 - це виходи сканування рядків клавіатури й перебору індикаторів при відображенні. При надходженні інформації від клавіатури контролер виробляє запит на переривання, виставляючи на виході IRQ сигнал активного рівня. Цей сигнал надходить на один із входів зовнішніх переривань мікроконтролера. Найменування виводів мікросхеми i8279: D0…D7 - входи-виходи з третім станом CS - вибір мікросхеми RD - читання WR - запис A0 або C/D - команда / данні CLK - синхронізація RES - початкова установа S0…S3 - сканування BD - гасіння ндикації OUTA3… OUTA0, OUTB3… OUTB0 - коди символів R0…R7 - прийом сигналів з клавіатури SHIFT - верхній / нижній регістр IRQ - запит переривання Технологічні та електричні характеристики: Технологія - ТТЛШ Напруга живлення, В - 5 Вихідна напруга, В: високого рівня - 2,4 низького рівня - 0.45 Вихідний струм, мA: при напруз низького рівня - 5 при напруз високого рівня - 1 Вхідний струм, мкA: низького рівня - 30 високого рівня - 30 Потужність - 350 мВт Струм споживання - 60 мА Режими роботи нтерфейсу клавіатури: 1. Послідовне опитування матриці клавіш із декодуванням і забороною уведення двох одночасно натиснутих клавіш. 2. Послідовне опитування з дешифруванням лічильника сканування з дозволом натискання N клавіш (N<=8). 3. Послідовний режим без дешифрації клавіш із забороною уведення 2х і більше натиснутих клавіш (S0-S3 - Висновки лічильника, до нього підключений 8 розрядний дешифратор (128 кл)) 4. Послідовне опитування без дешифрування й з дозволом N натиснутих клавіш N<=8. 5. Послідовне опитування матриці датчиків з дешифруванням матриці сканування. 6. Послідовне опитування матриці датчиків без дешифрування матриці сканування. 7. Стробований вхід з дешифруванням лічильника сканування, що використається для опитування. 8. Стробований вхід без дешифрування лічильника сканування, що використається для опитування. Режими роботи блоку індикації: 0. Виводить символ на 8мі розрядну індикацію, з розміщенням їх ліворуч праворуч. 1. Виводить символ на 16ти розрядну індикацію, з розміщенням їх ліворуч праворуч. 2. Виводить символ на 8мі розрядну індикацію, зі зрушенням раніше відображеної інформації вліво. 3. Виводить символ на 16ти розрядну індикацію, зі зрушенням раніше відображеної інформації вліво. Згідно завданню треба організувати 8 індикаторів та 11 клавіш. Для перетворення двійкового коду у семисегментний використаємо дешифратор К155ИД7, який має три входи і вісім виходів, чого достатньо для виконання поставленої задачі. Даний дешифратор у своєму составі має керуючі входи для організації динамічно ндикації.
Рис.14 - Умовне графічне позначення К155ИД7 Найменування виводів: А0-А2 - адресн входи, Q0-Q7 - лін виходу, С1-С3 - ліній вибору мікросхеми. Технологічні та електричні характеристики: Технологія - ТТЛШ Напруга живлення, V - 5 Вихідна напруга, V високого рівня - 2,2 низького рівня - 0.8 Вихідний струм, mA при напруз високого рівня - 20 при напруз низького рівня - 8 Струм споживання, mA – 74
Рис.15 - Схема підключення блоку i8279 Сформуємо формат команди встановлення режиму роботи контролера: ICW1 = 00000001B = 01H Обрано Режим 0 роботи інтерфейсу індикації та Режим 1 роботи інтерфейсу клавіатури, вивід символів на 8мі розрядну індикацію з розміщенням їх ліворуч праворуч та з запереченням натискання двох або більше клавіш. Сформуємо формат команди програмування синхронізації: ICW2 = 00110100B = 34H. Коефіцієнт переліку вибрано рівним 20, тобто 10100В, тому що внутрішня частота інтерфейсу не повинна перевищувати 100кГц (2МГц /20 = 100кГц). Сформуємо формат команди запису у ОЗП індикації: ICW3 = 10010000B = 90H Сформуємо формат команди читання ОЗП клавіатури: ICW4 = 01010000B = 50H Програма ініціалізац контролера клавіатури і індикації i8279
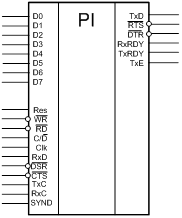
2.6 Адаптер послідовного інтерфейсу Intel 8251Адаптер послідовного інтерфейсу слугує для обміну інформацією у послідовному коді у двох режимах: асинхронному та синхронному. Умовно графічне зображення адаптеру наведено на Рис.16
Рис.16 - Адаптер послідовного інтерфейсу i8254 Електричн параметри i8251: 1. Напруга живлення - 5 В 2. Вихідна напруга: високого рівня - 2,4 В низькі рівні - 0,45 В 3. Вихідний струм високого рівня - 1 мА 4. Вихідний струм низького рівня - 5 мА 5. Вхідний струм високого рівня - 30 мкА 6. Вхідний струм низького рівня - 30 мкА Програмування адаптеру послідовного інтерфейсу Intel 8251 Завдання: Запрограмувати адаптер i8251 для роботи у асинхронному режимі на випадок: кількість стоп-біт: 2 кількість нформаційних біт: 8 контроль парності коеф. ділення частоти синхронізації: 16 кількість посилок: 48 Програма: Спочатку сформуємо слово приказу - 11011110 #DEH Початковий адрес у пам’яті #100Н Кінцевий адрес у пам’яті #130Н Адреса адаптеру #E000H i8251: ; оголошення констант . equadr1 = 0xE001; адреса А0=1 . equadr2 = 0xE000; адреса адаптеру . equmask1 = 0x01; відокремлення TxRDY . equmask2 = 0x02; відокремлення RxRDY . equmask3 = 0b00111000; виявлення помилок ldiR0, 0xDE; слово приказу stsadr1, R0; програмув. на асинхр. режим m1: ldiR0, 0x01; завантаження РПД=1 stsadr1, R0; слово команда, дозвіл ; передачі m2: ldsR0, adr1; читання слова-стану andiR0, mask1; маскування біта TxRDY breqm2 ldiR31, 0x01; поч. адреса для видачі 100H потрапляє у ; старший байт Z (ZH=R31) ldiR2, 0x30; 48 посилок m3: ; програмув. передачі ld R3, Z+; передача з слідуючої комірки у РОН stsadr2, R3; видача байту інформації decR2; декримент лічильника cpiR2, 0 brnem3 RET m4: ldiR0, 0x04; завантаження РПД=1 stsadr1, R0; слово команда, дозвіл ; прийому m5: ldsR0, adr1; читання слова-стану andiR0, mask2; маскування біта RxRDY breqm5 ldsR0, adr1; читання слова-стану andiR0, mask3; перевірка на факт помилки brneerror ldiR30, 0x31; поч. адреса для прийому 131H ; потрапля побайтово до молодшого та ; старшого байтів рег. Z (ZL=R30) ldiR31, 0x01; (ZH=R31) ldiR2, 0x30; 48 посилок m6: ; програмув. прийому ldsR3, adr2; прийом байту інформації stZ+, R3; прийом у слідуючу комірку РОН decR2; декримент лічильника cpiR2, 0 brnem6 RET 2.7 Розрахунок електричних навантажень на лінії мікросхемПроведемо розрахунок навантажувальних характеристик для виходів мікроконтролера для шини даних, адреси і керування. Навантаження на шину даних мікроконтролера визначається по формулі: IвихDL =IвхСKI + IвхPIТ + IвхOZU + IвхPZU + IвхACP = 0,03 + 0,03 + 1,6 + 0,25 + 0,1 = = 2,01 мА; IвихDH = IвхCKI + IвхPIТ + IвхOZU + IвхPZU +IвхACP = 0,03 + 0,03 + 0,1 + 0,04 + 0,1 = = 0,3 мА; СD = СCKI + СPIТ + СOZU + СPZU + СACP = 5 + 5 + 25 + 35 + 6 = 76 пФ. Так як навантаження на шину даних не перевищує 40 мА, то використання додаткового шиного формувача не потрібне. Використаний буферний регістр відповіда поставленим вимогам. Навантаження на шину адреси мікроконтролера визначається по формулі: IвихАL =IвхСKI + IвхPIТ + IвхOZU + IвхPZU = 0,03 + 0,03 + 1,6 + 0,50 = 2,16 мА; IвихАH = IвхCKI + IвхPIТ + IвхOZU + IвхPZU = 0,03 + 0,03 + 0,1 + 0,08 = 0,24 мА; СА = СCKI + СPIТ + СOZU + СPZU = 5 + 5 + 25 + 30 = 65 пФ. Так як навантаження на шину адреси не перевищує 40 мА, то використання додаткового шиного формувача не потрібне. Використаний буферний регістр відповіда поставленим вимогам. Навантаження на шину керування мікроконтролера визначається по формулі: IвихСL =IвхСKI + IвхPIТ + IвхOZU + IвхPZU = 0,03 + 0,03 + 1,6 + 0,25 = 1,94 мА; IвихСH = IвхCKI + IвхPIТ + IвхOZU + IвхPZU = 0,03 + 0,03 + 0,1 + 0,04 = 0,23 мА; СС = СCKI + СPIТ + СOZU + СPZU = 5 + 5 + 25 + 25 = 60 пФ. Отримані при розрахунку значення струмув та ємностей не перевищують граничні значення. ВисновкиВ ході виконання курсової роботи була розроблена повна принципова схема мікропроцесорної системи. Були розглянуті різні варіанти структурної та принципової схем. Згідно із завданням складена програма ініціалізації окремих блоків. Обрані та розрахован необхідні у системі елементи. Була розглянута видача і запис інформації в пам’ять, АЦП, керування системою за допомогою клавіатури та індикації. Виконання курсово дозволить у подальшому без труднощів розробляти подібні та ще більш складн процесорні системи. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

|
|
| 17.06.2012 |
| Большое обновление Большой Научной Библиотеки |
| 12.06.2012 |
| Конкурс в самом разгаре не пропустите Новости |
| 08.06.2012 |
| Мы проводим опрос, а также небольшой конкурс |
| 05.06.2012 |
| Сена дизайна и структуры сайта научной библиотеки |
| 04.06.2012 |
| Переезд на новый хостинг |
| 30.05.2012 |
| Работа над улучшением структуры сайта научной библиотеки |
| 27.05.2012 |
| Работа над новым дизайном сайта библиотеки |