|
Учебное пособие: КинематикаУчебное пособие: КинематикаКинематика тема 1 кинематика точки 1.1 предмет изучения С самого рождения и на протяжении всей своей жизни мы встречаемся с движением материи. Простейшей формой движения материи является механика. В разделе «кинематика» мы будем изучать только одну сторону механического движения – геометрическую, т.е. мы будем изучать геометрию движения тела без учета его массы и сил, действующих на него. Механически движение в общем смысле будет изучаться в разделе «динамика». Под движением в механике мы будем понимать перемещение данного тела в пространстве и времени по отношению к другим телам. Для определения положения движущего тела вводится система отсчета, связанная с телом, условно принимаемым за неподвижное. Движение тела происходит в пространстве и времени. Мы будем рассматривать трехмерное эвклидо пространство. За единицу длины в нем принимается 1 метр. Время считается универсальным, т. е. не зависящим от выбранной системы отсчета. За единицу времени принимается 1 секунда. В задачах механики время принимается за независимую переменную. Все остальные кинематические величины (расстояния, скорости, ускорения и т.д.) являются функциями времени. Прежде чем изучать движение его необходимо задать, т.е. описать каким-либо математическими формулами так, чтобы можно было узнать положение тела и все его кинематические характеристики в любой момент времени. Основная задача
кинематики заключается в том, чтобы по известному закону движения тела (или
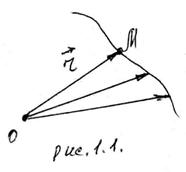
какой-либо его точки) найти все остальные Изучение кинематики мы начнем с изучения движения простейшего тела – точки, т.е. такого тела, размерами которого можно пренебречь и рассматривать его как геометрическую точку. 1.2 Способы задания движения точки Мы будем рассматривать три способа задания движения: векторный, координатный и естественный. 1.2.1 Векторный способ Положение движущейся
точки М определяется с помощью радиуса вектора
называется уравнением движения (или законом движения) в векторной форме. Линия, описываемая концом этого вектора называется траекторией движения.
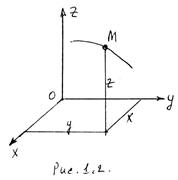
1.2.2 Координатный способ С неподвижным центром О связывается неподвижная система координат ОХ у Z. Положение точки определяется тремя координатами: х, у, z (рис. 1.2). В процессе движения эти координаты изменяются, т.е. они являются функциями времени.
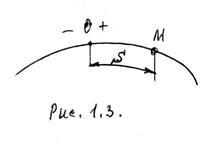
Зависимости х=f1(t); у=f2(t); z=f3(t) (1.2) называются уравнениями движения точки в координатной форме. Эти уравнения являются одновременно параметрическими уравнениями траектории движения (параметром является t). Чтобы получить уравнение траектории в явной форме, надо из уравнений (1.2) исключить параметр t. 1.2.3 Естественный способ При естественном способе задания движения траектория заранее известна. На траектории выбирается начало отсчета (т. 0) и устанавливается положи-тельное и отрицательное направления отсчета. Положение точки на траектории однозначно определяется криволинейной координатой S, измеряемой вдоль траектории. Зависимость S = f(t) (1.3) называется уравнением движения в естественной форме.
1.2.4 Связь между способами задания движения Координатный векторный способы связаны зависимостью:
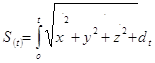
где Переход от координатного способа к естественному:
здесь: (т.е. здесь и в дальнейшем производная по времени обозначается точкой над буквой). 1.3 Определение скорости и ускорение точки при векторном задании движения Пусть точка за время Например, вектор
Рис. 1.4
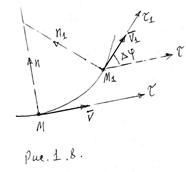
Направлен вектор скорости по касательной к траектории. Определение ускорения: Пусть в положении М
скорость Среднее ускорение:
Ускорение в данный момент
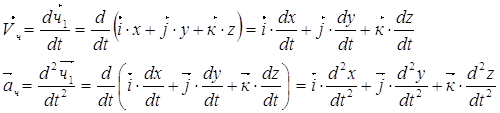
Лежит вектор ускорения в плоскости, проведенных через касательной к траектории в двух бесконечно близких точках. Эта плоскость называется соприкасающейся или плоскостью главной кривизны. 1.4 Определение скорости и ускорения точки при координатном способе задания движения при координатном способе задания движения:
с другой стороны:
Сравнивая (а) и (б) находим:
т.е. проекция вектора скорости на оси координат равны первым производным по времени от соответствующих координат. Величина скорости:
направление вектора скорости определяется с помощью направляющих косинусов, т.е. косинусов углов между вектором скорости и осями координат (рис. 1.6).
Аналогично ищем ускорения:
Сравнивая (в), (г), (д) находим:
Проекция ускорения равны первым производным по времени от соответствующих проекций скорости или вторым производным по времени от соответствующих координат. Величина ускорения:
Направляющие косинусы:
1.5 Определение скорости и ускорения точки при естественном задании движения Пусть за время
величина скорости точки:
Направлена скорость по касательной к траектории: Найдем ускорение точки. Пусть в положении М
точка имеет скорость Полное ускорение точки будет:
Обозначим угол между
касательными через
Найдем эти пределы,
учитывая, что при
где ρ радиус кривизны траектории в данной точке. Подставив эти значения в ап получим:
Т.о. величины касательного, нормального и полного ускорений определяется формулами:
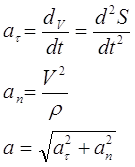
Касательное ускорение направлено по касательной к траектории (в сторону скорости при ускоренном движении и противоположно скорости – при замедленном) и характеризует изменение величины скорости. Нормальное ускорение направлено по нормам к траектории к центру кривизны и характеризует изменение направления скорости. 1.6 Частные случаи движения точки По виду траектории движение делится на прямолинейное и криволинейное. При прямолинейном движении ап = 0, т.к. ρ = ∞. По изменению величины скорости движения делится на равномерные и неравномерные. Движение называется равномерным, если величина скорости постоянна (V=const). Закон равномерного движения: S=S0+Vt (1.18) Движение называется равномерным, если величина касательного ускорения постоянна.
Т.о. равномерное движение описывается двумя формулами:
Нормальное ускорение направлено от данной точки к оси вращения Тема 2 Простейшие движения тела К простейшим движениям твердого тела относятся поступательное движение и вращательное движение вокруг неподвижной оси. 2.1 Поступательное движение твердого тела Поступательным называется такое движение тела, при котором любой отрезок прямой проведенной в теле перемещается параллельно самому себе. Это самое простое движение тела. Оно описывается одной теоремой: При поступательном движении тела все его точки описывают одинаковые, при наложении совпадающие траектории, и имеют одинаковые скорости и одинаковые ускорения. Доказательство: Проведем в теле произвольный отрезок АВ. При движении тела он остается параллельным самому себе (рис. 2.1). траектория точки А на величину АВ, т.е. они одинаковые.
Проведем из неподвижного
центра О радиусы-векторы точек А и В ( Очевидно, что
Продифференцируем это
векторное равенство по времени, учитывая, что
дифференцируя (2.1) по времени:
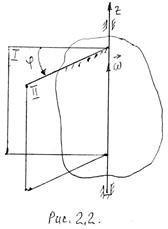
Так как точки А и В взяты произвольно, то все выводы справедливы для всех точек тела. Следовательно, при поступательном движении тела его можно считать точкой и пользоваться формулами кинематики точки. 2.2 Вращение тела вокруг неподвижной оси Вращательным называется такое движение тела, при котором хотя бы две точки, принадлежащие телу или жестко с ним связанные, во все время движения остаются неподвижными. Прямая, проходящая через эти две неподвижные точки называется осью вращения. Проведем через ось вращения две полуплоскости: неподвижную І и подвижную II, жестко связанную с телом и вращающуюся вместе с ним (рис. 2.2). Положением тела будет однозначно определяться углом φ между этими полуплоскостями. Угол φ называется углом поворота. Измеряется он в радианах. Положительное направление φ против часовой стрелки, если смотреть навстречу оси Z. Зависимость φ = φ(t) (2.3) называется уравнением вращательного движения.
Быстрота вращения характеризуется угловой скоростью ω. Средняя угловая скорость определяется как отношения приращения угла поворота ∆φ к промежутку времени ∆t, за который оно произошло.
Угловая скорость в данный момент времени:
Вектор угловой скорости Формула перехода:
Изменение угловой скорости характеризуется угловым ускорением ε, которая определяется как первая производная от угловой скорости или вторая производная от угла поворота по времени:
Направлен вектор 2.3 Равномерное и равнопеременное вращение Вращение называется равномерным, если угловая скорость постоянна, т.е. ω = const. Закон равномерного вращения: φ=φ0+ωt (2.6) Вращение называется равнопеременным, если угловое ускорение постоянно, т.е. ε = const. Но
Подставив сюда
2.4 Скорости и ускорение точек вращающегося тела пусть за время dt тело повернулось на угол dφ, а точка М, находящаяся на расстоянии R от оси вращения, получила перемещение dS=ч* dφ (рис. 2.3). Тогда скорость точки
Направлен вектор скорости
Найдем нормальное и касательное ускорение точки:
Нормальное ускорение направлено от данной точки к оси вращения. Касательное ускорение направлено по касательной к округлости, которую описывает точка и совпадает с направлением скорости при ускоренном вращении, а при немедленном противоположно скорости. Рассмотрим векторное
произведение
взяв от этого выражения производную по времени, получим:
Первое произведение по величине и направлению совпадает с касательным, а вторая – с нормальным ускорением. Таким образом, касательная и нормальная составляющие вектора полного ускорения при вращательном движении определяется формулами:
Отметим, что
радиус-вектор 2.5 Простейшие передаточные механизмы Передаточными называют механизмы, служащие для передачи вращения с одного вала на другой. К простейшим из них относятся: зубчатые, ременные, цепные и фрикционные. Схематическое изображение зубчатых и фрикционных механизмов показано на рис. 2.5а, а ременных и цепных на рис. 2.5.б. Найдем скорость точки а: Отсюда:
т.е. угловые скорости обратно пропорциональны радиусом колес. Величина i1-2 называется передаточным отношением. У зубчатых и цепных передач – передаточное отношение точное, у ременных и фрикционных – может быть проскальзывание. Ременные и цепные передачи позволяют передавать вращение на большие расстояния, чем зубчатые и фрикционные. С устройством передаточных механизмов, их изготовлением, расчетами и эксплуатацией вы познакомитесь в курсах «Теория механизмов и машин» и «Детали машин». Тема 3 Сложное движение точки 3.1 Основные определения До сих пор мы рассматриваем движение точки в одной, неподвижной системе отсчета. Однако, часто встречаются случаи, когда точка движется по определенному закону в некоторой системе отсчета, которая, в свою очередь, перемещается относительно неподвижной системы отсчета. Такое движение точки называется сложным. Введем основные определения сложного движения точки. Движение точки в
подвижной системе отсчета называется относительным. Скорость и ускорение точки
в этом движении называются относительными и обозначаются: Движение точки вместе с
подвижной системой называется переносным. Скорость и ускорение той точки М/
подвижной системы, в которой в данный момент находится движущаяся точка М,
являются для данной точки переносной скоростью и переносным ускорением и
обозначаются Движение точки
относительно неподвижной системы отсчета называется абсолютным. Скорость и
ускорение точки в этом движении называются абсолютными и обозначаются Пусть точка М движется в подвижной системе отсчета охуz. Ее координаты х, у, z являются функциями времени, а координаты х/, у/, z/ точки М/ подвижной системы, в которой в данный момент находится движущая точка М, являются константами. Но в любой момент времени х = х/, у = у/, z = z/ (3.1) Введем в рассмотрение радиусы-векторы, определяющие положение точек М и М/ в подвижной и неподвижной системах отсчета (рис. 3.1).
3.2 Теоремы о схождении скоростей и ускорений Скорости и ускорения точки в различных движениях будем определять как первую и вторую производные по времени от соответствующих радиусов-векторов. 1.
Относительную
скорость и относительное ускорение находим как первую и вторую производные по
времени от радиус-вектора
2.
Переносную
скорость и переносное ускорение находим как первую и вторую производные по
времени от радиус-вектора
так как дифференцирование проведено, то мы можем воспользоваться равенствами (3.1), т.е. заменить х/ на х, у/ на у, z/ на z:
3.
Абсолютную
скорость и абсолютное ускорение находим как первую и вторую производные по
времени от радиус-вектора
Таким образом доказана теорема сложения скоростей: Абсолютная скорость равна геометрической сумме переносной и относительной скоростей.
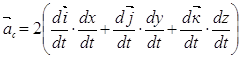
находим абсолютное ускорение:
где введено обозначение:
Величина Абсолютное ускорение точки равно геометрической сумме переносного, относительного и Кориолисов ускорений.
3.3 Ускорение Кориолиса, его величина направление и физический смысл Рассмотрим ускорение Кориолиса, определяемое равенством (3.7). Если подвижная система движется относительно неподвижной поступательно (т.е. переносное движение поступательное), то единичные орты будут постоянны и по модулю и по направлению и их производные по времени будут равны нулю, следовательно и ускорение Кориолиса равно нулю. Теорема о сложении ускорений при поступательном переносном движении будет выражаться равенством:
Рассмотрим переносное
вращательное движение. Пусть подвижная система вращается вокруг оси О3 с угловой
скоростью
Следовательно:
с другой стороны, скорости точек А, В и С мы можем найти как во вращательном движении по формуле (2.11):
сравнивая (а) и (б) находим, что:
Подставим эти значения в формулу (3.7)
Таким образом ускорение Кориолиса равно удвоенному векторному произведению вектора угловой скорости переносного движения на вектор относительной скорости.
Его величина
В соответствии с правилом
векторного произведения ускорения Кориолиса направлено перпендикулярно
плоскости, в которой лежат векторы Другое правило: чтобы
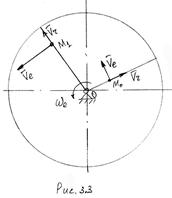
найти направление ускорения Кориолиса, надо вектор Физический смысл
ускорения Кориолиса выясним на таком примере. Пусть круглая платформа вращается
с постоянной угловой скоростью Таким образом, ускорение Кориолиса характеризует изменение относительной скорости в результате переносного движения и изменение переносной скорости в результате относительного движения. В общем случае движения формулы (3.8) удобнее использовать в таком виде:
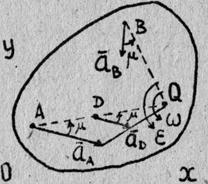
Задача кинематики плоского движения твердого тела - найти характеристики движения самого тела и отдельных его точек. В данном задании к таким характеристикам относятся векторы угловой скорости и углового ускорения тела.
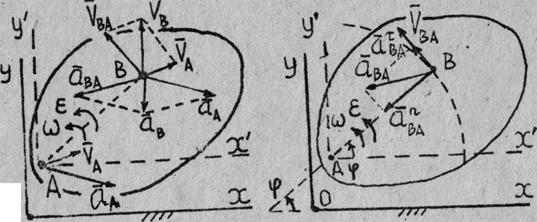
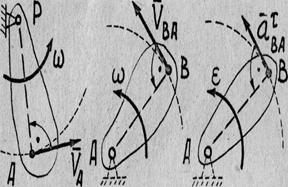
Основные формулы кинематики плоского движения твердого тела - векторные формулы, связывающие соответственно скорости и ускорения двух произвольных точек плоской фигуры, например, точек А и В (рис. 1)
где Левые части выражений
являются соответственно векторами скорости, нормального и касательного ускорения точки В
относительно системы координат Ax'y'z' при вращении отрезка АВ в плоскости рисунка вокруг точки A, называемой в таком
случае полюсом, с угловой скоростью ½ Векторы Поскольку модуль ускорения Векторы Модуль проекции равен модулю вектора Если
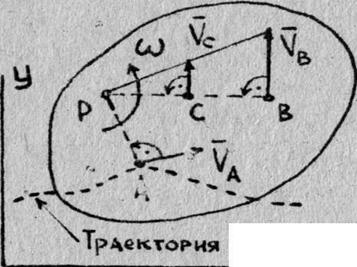
О направлении векторов Из формул, использующих понятие МЦС (точка Р) на рис.2,
следует, что в данный момент времени распределение скоростей точек
тела при плоском движении таково, как если бы тело вращалось вокруг оси Рz с угловой скоростью
Из формул, использующих понятие МЦУ (точка Q на рис. 3),
следует, что в данный момент времени распределение ускорений точек
тела при плоском движении таково, как если бы тело вращалось вокруг оси Qz с угловой скоростью Угол Направления векторов
Рис. 4 Чтобы избежать анализа расположения трех взаимно перпендикулярных
векторов формул (7) при известных
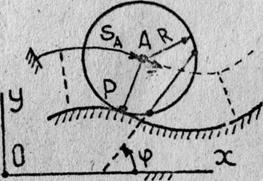
Рис. 5 Кинематика плоского движения катка радиуса R. при отсутствии скольжения по направляющей (в общем случае криволинейной), имеет некоторые особенности вследствие того, что мгновенный центр скоростей катка (точка Р ) совпадает с точкой окружности касающейся направляющей (рис. 5). Поэтому при движении катка расстояние от его центра (точки А) до МЦС является неизменным во времени и равным R. AP(t) = const = R (8) Свойство неизменности расстояния АР позволяет установить дополнительные соотношения, удобные для расчетов кинематических характеристик катка. Представим вектор скорости точки А с помощью: а) формулы естественного способа задания движения точки
б) формулы (7) плоского движения тела
Приравнивая правые части последних формул, имеем
Поскольку вектoр
Откуда, используя свойство (8), получим формулы
справедливые для любого момента времени t. В правой части формулы (9) берется знак "+", если при мысленном увеличении угла поворота катка j в направлении против хода стрелки часов наблюдается возрастание координаты SА центра движущегося катка в положительном направлении ее отсчета, иначе берется знак "-". Так, например, для случая отсчетов SА и j, изображенном на рис.5, в формуле (9) необходимо брать знак "-". Дифференцируя и интегрируя по времени соотношения (9), придем к выражениям
а также где С - некоторая константа, значение которой зависит от выбора начал отсчетов SА и j. Обычно принимают С=0, так как считают, что когда SА=0, j также равно нулю. Из произведения соответствующих частей формул (9), (10),
Таким образом, с помощью формул (1-4), (8-9) могут быть найдены характеристики векторов скоростей и ускорений точек, векторов угловых скоростей и ускорений звеньев механизма, а с помощью формул (5, 6), (11) осуществлена их проверка. Нахождение кинематических характеристик движения ( 1) написать формулу (1) или (2) применительно к конкретным точкам рассматриваемого звена механизма. При этом в качестве полюса следует взять точку с известными кинематическими характеристиками движения; 2) установить, известны или неизвестны на данном этапе решения две независимые характеристики {проекции на две оси или модуль и направляющий угол) для каждого вектора, входящего в уравнение (1) или (2). Найти значения тех независимых характеристик векторов, которые могут быть установлены из условий движения звена без решения рассматриваемого векторного уравнения; 3) решить векторное уравнение графоаналитическим или аналитическим методом (метод проекций). |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 - средняя скорость.
- средняя скорость.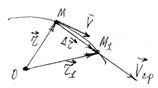
 (1.7)
(1.7) ;
;  ;
;  (1.8)
(1.8)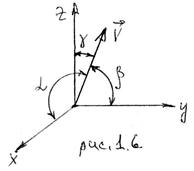
 (1.10)
(1.10)
 (1.11)
(1.11)
 (1.19)
(1.19)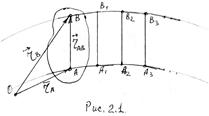
 (2.3)
(2.3) (2.4)
(2.4) (2.5)
(2.5) находим, что
находим, что  ,
получим уравнение переменного вращения:
,
получим уравнение переменного вращения: (2.9)
(2.9)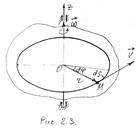
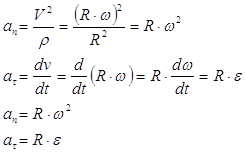
 (2.12)
(2.12)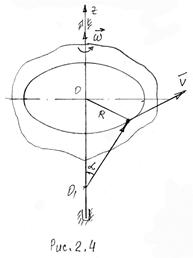
 (2.13)
(2.13)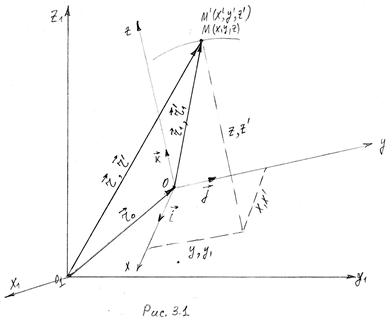


 (3.7)
(3.7)
 ;
;  ;
;  ; (в)
; (в)
|
|
| 17.06.2012 |
| Большое обновление Большой Научной Библиотеки |
| 12.06.2012 |
| Конкурс в самом разгаре не пропустите Новости |
| 08.06.2012 |
| Мы проводим опрос, а также небольшой конкурс |
| 05.06.2012 |
| Сена дизайна и структуры сайта научной библиотеки |
| 04.06.2012 |
| Переезд на новый хостинг |
| 30.05.2012 |
| Работа над улучшением структуры сайта научной библиотеки |
| 27.05.2012 |
| Работа над новым дизайном сайта библиотеки |