|
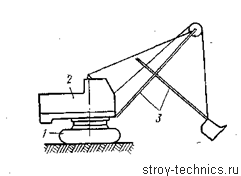
Контрольная работа: Дорожно-строительные машины: экскаваторыКонтрольная работа: Дорожно-строительные машины: экскаваторыФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ Государственное образовательное учреждение высшего профессионального образования ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ АРХИТЕКТУРНО-СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ Кафедра «Автомобильные дороги и аэродромы» Контрольная работа по дисциплине «Дорожные машины, производственные базы» на тему «Дорожно-строительные машины: Экскаваторы» Тюмень 2010 г. Классификация машин Экскаватор (от лат. excavo - выдалбливать), землеройная машина, оборудованная навесным рабочим органом - ковшом, осуществляющим резание грунта одновременно с его наполнением. Благодаря высокой производительности при разработке грунтов различных категорий наибольшее распространение получили одноковшовые экскаваторы. Экскаваторы разделяют на несколько групп по назначению и мощности. Если машина производит все операции в определенном порядке, повторяя их через некоторые промежутки времени, она относится к машинам прерывного (цикличного) действия, если производит все операции одновременно,— машиной непрерывного действия. К экскаваторам прерывного действия относятся одноковшовые, а к экскаваторам непрерывного действия — многоковшовые, скребковые и фрезерные. Одноковшовые и многоковшовые экскаваторы бывают сухопутные и плавучие. Сухопутные экскаваторы имеют гусеничное, пневмоколесное, рельсовое и шагающее ходовое устройство. Все механизмы экскаватора приводятся в движение дизелями, карбюраторными, паровыми или электрическими двигателями. Наиболее экономичными являются дизельные и электрические двигатели. Выбор двигателя определяется условиями, в которых будет работать экскаватор. Так, на экскаваторах, работающих в карьере, выгодно применять электродвигатели, так как электричество — наиболее дешевый вид энергии, а при работе на строительстве дорог, где машину часто перевозят с места на место, целесообразно использовать дизельные двигатели. Если все механизмы экскаватора приводятся в движение от одного двигателя, такой привод называют одномоторным. Если в экскаваторе каждый механизм (или группа механизмов) приводится в движение отдельным двигателем, такой привод называется многомоторным. С целью передачи движения от двигателя к рабочим механизмам используют следующие виды приводов: – механический, когда движение передается с помощью валов, шестерен, червячных пар, цепных передач; – гидравлический объемный, где роль привода выполняют гидронасос, маслопроводы и гидромоторы (или гидроцилиндры); в маслопроводах циркулирует жидкость, передающая энергию от насосов к гидромоторам (или гидроцилиндрам), приводящим рабочие механизмы в движение; – гидромеханический, в котором для передачи энергии используют гидротрансформатор в сочетании с механической трансмиссией; – электрический, применяемый на экскаваторах с многомоторным приводом в сочетании с механическим; – смешанный, состоящий из приводов двух видов, например механического и электрического. Таким образом, экскаваторы классифицируют: – по способу перемещения (плавучие и сухопутные); – по типу силового оборудования (с дизелем, карбюраторным, электрическим, дизель-электрическим и т. д.); – по числу двигателей (одномоторные, многомоторные); – по виду привода (механические, гидравлические, гидромеханические, электрические); – по типу ходового устройства сухопутных экскаваторов (гусеничные, пневмоколесные, рельсовые и с шагающим ходовым оборудованием). Каждая из групп экскаваторов отличается более мелкими признаками — размерами, мощностью, назначением. Одноковшовые экскаваторы классифицируют по назначению. Существуют три основные группы: – строительно-универсальные — с ковшами емкостью до 3 м3, предназначенные для производства земляных работ; – карьерные — с ковшами емкостью от 2 до 8 м3, предназначенные для работы в карьерах на разработке рудных и угольных месторождений; – вскрышные — с ковшами емкостью более 6 м3, предназначенные для разработки верхних слоев пород (вскрыши). Одноковшовые экскаваторы различают по использованию их с различными видами рабочего оборудования. Универсальные экскаваторы предназначены для работы с различными видами сменного оборудования; прямой и обратной лопатой, драглайном, крановой стрелой с крюковой подвеской или грейфером, копром для забивки свай и т. д. Полууниверсальные экскаваторы кроме основного рабочего оборудования имеют один или два вида дополнительного сменного оборудования (прямую лопату, обратную лопату, драглайн). Основные рабочие органы машины Рабочее оборудование включает комплекс узлов экскаватора с рабочим органом (ковш, крюк, грейфер и др.). Грунт разрабатывают ковшом, после чего перемещают к месту разгрузки в отвал или в транспортное средство. В зависимости от вида сменного оборудования применяют жесткую или гибкую подвеску рабочего органа. Характер работы определяет рабочее оборудование: прямую лопату, обратную лопату, драглайн, кран или грейфер. Одноковшовые экскаваторы. Одноковшовым универсальным экскаватором называется машина цикличного действия, предназначенная для выемки и перемещения грунтов и иных материалов с помощью одного из видов рабочего оборудования с одним ковшом, и для выполнения погрузочных сваебойных и прочих работ другими видами сменного рабочего оборудования. Одноковшовые экскаваторы (рис. 1) состоят из следующих основных узлов: ходового устройства, поворотной платформы с силовым оборудованием и основными кинематическими звеньями и рабочего оборудования. Гусеничное ходовое оборудование обеспечивает высокую проходимость и хорошую устойчивость при работе экскаватора.
Рис. 1. Cхемa одноковшового экскаватора
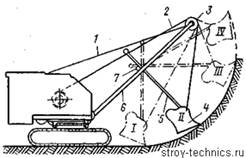
Поворотная платформа опирается через катки или специальное (шариковое или роликовое) опорно-поворотное устройство на раму ходового устройства. Платформа поворачивается в горизонтальной плоскости относительно ходовой части. Угол поворота ходового оборудования в горизонтальной плоскости определяет возможность экскаватора быть полноповоротным или неполноповоротным. Поворотная часть полно-новоротного экскаватора может вращаться вокруг своей оси на 360°. У этих машин на поворотной платформе смонтированы все силовые агрегаты, пульт управления, рабочие механизмы и крепится рабочее оборудование. Рабочее оборудование включает комплекс узлов экскаватора с рабочим органом (ковш, крюк, грейфер и др.). Грунт разрабатывают ковшом, после чего перемещают к месту разгрузки в отвал или в транспортное средство. В зависимости от вида сменного оборудования применяют жесткую или гибкую подвеску рабочего органа. Характер работы определяет рабочее оборудование: прямую лопату, обратную лопату, драглайн, кран или грейфер. Рабочий цикл экскаватора выполняется в следующей последовательности: копание грунта; перемещение заполненного грунтом ковша к месту разгрузки; разгрузка грунта из ковша в отвал или транспортирующее устройство; перемещение ковша (поворот платформы) к забою; опускание ковша для подготовки к следующей операции копания. Прямая лопата — оборудование, предназначенное для разработки грунта выше уровня стоянки экскаватора. Прямая лопата с механическим приводом (рис. 2) состоит из следующих основных узлов: каната подъема стрелы, ковша, рукояти, стрелы, седлового подшипника. Рукоять к стрелке крепится седловым подшипником, с помощью которого рукоять поворачивается в вертикальной плоскости относительно стрелы и совершает возвратно-поступательное движение вдоль оси рукоятки. При копании грунта ковшу нужно пройти положения —IV, изображенные на рис. 74. Ковш поднимается подъемным канатом, огибающим головные блоки. Напор рукоятки осуществляется напорным механизмом, которым выполняется также обратное движение (возврат) рукояти. На универсальных строительных экскаваторах применяют канатные и зубчато-реечные (напорные механизмы).
Рис. 2. Схема работы прямой лопаты
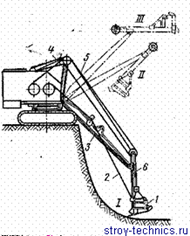
Ковш прямой лопаты состоит из корпуса, откидного днища с засовом и сменных зубьев. Зубья имеют сужающийся к концу хвостовик, входящий в гнездо козырька. От выпадения зубья удерживаются в гнездах шплинтами. Прямые лопаты в последние годы оснащают ковшами с полукруглой передней стенкой и с козырьком в виде совка без зубьев. Ковш такой конструкции значительно легче и имеет минимальное сопротивление при копании грунта, что, естественно, повышает производительность экскаватора. На экскаваторах с прямой лопатой применяют рукояти двух типов: однобалочные (внутреннего типа) и двухбалочные (внешнего типа). Однобалочная рукоять проходит внутри стрелы, а двухбалочная — снаружи. Рукоять может совершать возвратно-поступательное движение в направляющих седловины напорного вала, а также поворачиваться вместе с седловым подшипником в вертикальной плоскости относительно напорного вала. Конструкция рукояти определяет конструкцию напорного механизма. Стрела прямой лопаты выполнена в виде сварной конструкции из листовой стали. Тип рукояти определяет конструкцию стрелы. Стрела бывает двухбалочной при однобалочной рукояти и однобалочной при двухбалочной рукояти. В верхней части стрелы смонтированы на подшипниках блоки, через которые проходит канат подъема ковша и стрело-подъемный канат. Нижним концом (пятой) стрела пальцами крепится к поворотной платформе и может поворачиваться при изменении ее угла наклона. В средней части стрелы расположен напорный вал. Обратная лопата — это оборудование, предназначенное для разработки грунтов ниже уровня стоянки экскаватора при рытье котлованов, траншей, выемок. Обратная лопата (рис. 3) состоит из ковша, стрелы, рукояти и двуногой стойки. Ковш закреплен жестко к рукояти, шарнирно присоединенной к верхнему концу стрелы. При подтягивании каната рукоять поворачивается против часовой стрелки, ковш врезается в грунт (положение /; положения // и /// соответствуют транспортному положению и выгрузке грунта из ковша).
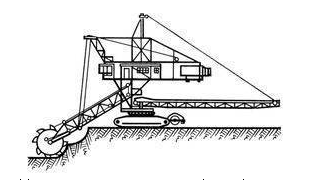
Рис. 3. Схема работы обратной лопаты Многоковшовые экскаваторы. Многоковшовые экскаваторы представляют собой землеройные машины, имеющие в качестве рабочего органа многоковшовую цепь или роторное колесо с ковшами, жестко закрепленными по периметру. Они применяются: на дорожно-строительных работах; при рытье котлованов, каналов и траншей для укладки труб или для оснований установка, пульт управления, коробка передач, рабочий орган устанавливают на ходовую раму. Скорости движения ковшовой цепи и машины должны быть согласованы с емкостью ковша и глубиной забоя, чтобы ковш, проходя путь забоя, смог к моменту выхода заполниться. Роторные траншейные экскаваторы применяют при прокладке магистральных трубопроводов и траншей. Рабочим органом у этих экскаваторов является ротор. По сравнению с цепными траншейными экскаваторами роторные имеют более высокий КПД и большую производительность.
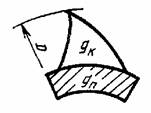
Рис. 4. Схема многоковшового экскаватора Область применения В настоящее время ни одна стройка в стране не обходится без экскаваторов. Их высокая производительность, способность работать в любых условиях, надежность, качество и разнообразие выполняемых ими земляных работ обеспечили этим машинам широкое применение в различных областях народного хозяйства. Недаром парк этих машин в нашей стране или, иными словами, общее количество экскаваторов, находящихся в ведении различных строительных организаций, составляет более 500 000. Однако потребность в них в связи с большим строительством в последние пятилетки так велика, что ежегодно на заводах изготавливается более 40000 экскаваторов. Для каких конкретно работ предназначены экскаваторы? Их можно использовать при рытье котлованов, каналов, траншей, разработке выемок и насыпей, сооружении дамб и расчистке территорий, на вскрышных работах и в карьерах, при перегрузке сыпучих строительных материалов и планировочных работах и во многих других случаях. Область их применения в строительстве практически не ограничена. Там, где есть доступ для этой машины, земляные работы будут выполнены с высоким темпом и качеством. Экскаваторы могут вести разработку грунта как выше уровня площадки, на которой они стоят, так и ниже этого уровня. Они могут действовать в стесненных условиях и разрабатывать грунт под слоем воды, выгружать выкопанный грунт в транспортные средства и отсыпать его на значительное расстояние от места копания в отвал, могут окончательно отделывать уклон и поверхность стенок траншей и котлованов, а также с достаточной точностью планировать горизонтальную поверхность строительной площадки или дна траншей и котлованов. Очевидно, что каждый вид работы требует применения приспособленных для этого экскаваторов и предназначенного для каждого конкретного случая рабочего оборудования. Под рабочим оборудованием подразумеваются те узлы машины, при помощи которых экскаватор непосредственно копает грунт (ковш, стрела, рукоять с системой их привода). Играет определенную роль в этих случаях также тип ходовой части машин: снабжен ли экскаватор гусеничным ходом, дающим машине возможность доступа в любое место строительной площадки при отсутствии подъездных путей и при плохих грунтовых условиях или имеет он пневмоколесную ходовую часть, хотя и обладающую худшей проходимостью, но позволяющую быстро перемещать машину с объекта на объект. Для выполнения определенных работ имеет значение вид привода рабочего оборудования. Так, экскаваторы с гидравлическим приводом более производительны, лучше приспособлены для планировочных, отделочных операций, однако машины с канатной подвеской более применимы при отрывке и углублении каналов с помощью ковша-драглайна, при земляных работах на значительном удалении от машины. И, конечно, большую роль при аренде экскаватора играет возможность поворота рабочего оборудования или, иными словами, наличие у них поворотной платформы, которая создает широкие возможности для выгрузки грунта и прочих работ. Таким образом, особенности конкретных видов земляных работ, которые необходим/) выполнить экскаватору, — например, вырыть котлован, траншею, канал, спланировать поверхность площадки или перегрузить строительные материалы, а также объем грунта, предполагаемого к выемке, и грунтовые условия на объекте диктуют применение экскаваторов с определенными рабочим оборудованием, ходовой частью и типом привода рабочего оборудования. Для выполнения всех возможных видов земляных работ выпускаются экскаваторы различного конструктивного исполнения. Их можно разделить на две большие группы: одноковшовые и многоковшовые. Одноковшовые экскаваторы (их называют иногда экскаваторами цикличного действия) все операции по копанию грунта, его перемещению и выгрузке выполняют последовательно и циклично: сначала заполняют ковш грунтом, затем поворачивают загруженный ковш, в конце поворота выгружают грунт из ковша (в отвал или транспортные средства) и, наконец, возвращают порожний ковш в начальное положение для загрузки. Далее этот цикл операций повторяется. Многоковшовые экскаваторы (их называют также экскаваторами непрерывного действия) выполняют все рабочие операции по копанию, перемещению и выгрузке грунта одновременно. Пока часть ковшей или ножей режет грунт, другие перемещают его, а третьи — выгружают. При работе этих машин нет ярко выраженного повторяющегося цикла рабочих операций. Однаковшовые экскаваторы получили большее распространение в строительстве, чем многоковшовые, в связи с тем, что обладают большей универсальностью. Универсальность – это способность экскаватора выполнять разнообразные земляные работы, начиная от сооружения траншей, котлованов, каналов и кончая отсыпкой насыпей и дамб, а также вести погрузочно-разгрузочные работы. Конечно, все это экскаватор может выполнять только с помощью различного сменного рабочего оборудования. Расчет производительности К основным факторам, влияющим на производительность экскаватора, относятся следующие: · трудность разработки горной массы, которая оценивается категорией породы и ее состоянием. При разработке, например, влажной глинистой породы, которая налипает на ковш, уменьшается полезный объем последнего и увеличивается продолжительность цикла из-за более длительной разгрузки ковша. В зимних условиях плохо раздробленный мерзлый грунт также снижает коэффициент наполнения ковша; · технические данные, состояние и надежность экскаватора; · квалификация машиниста; · качество забоя, оцениваемое его высотой, условиями подхода транспорта к месту погрузки, освещенностью; организация работ, зависящая от достаточности транспортных средств, состояния дорог, своевременного снабжения топливом, энергией, запасными частями и т.п. Настоящий стандарт распространяется на карьерные роторные экскаваторы для открытых горных работ и устанавливает единые методы определения расчетной теоретической, эффективной и эксплуатационной производительности, применяемые для сравнительной оценки технического уровня. 1. Максимальную расчетную теоретическую производительность по разрыхленной горной массе (Qтеор1) в кубических метрах в час рассчитывают по формулам Qтеор1=0,06×(gк + 0,5 gп)×Smax; (1) Qтеор1=3600×Fл×nл×Kн, (2) где gк - вместимость ковша (черт. 1); gп - вместимость подковшового пространства (черт. 1); Smax - число опорожнений ковша; vл - скорость ленты конвейера, м/с; Kн=0,9 (коэффициент загрузки ковша); Fл - расчетная площадь поперечного сечения транспортируемого материала на ленте, м2. Расчетную ширину ленты определяют по формуле В=0,9 Вл - 50, (3) где Вл - ширина ленты, мм.
Черт. 1 Из двух значений производительностей, полученных по формулам (1) и (2), принимают меньшее. 2. Теоретическую производительность по разрыхленной горной массе (Qтeop2) в кубических метрах в час рассчитывают по формулам: при заданном удельном усилии капания линейном (для трапециевидной формы ковша) Qтeop2= где a= (D - диаметр роторного колеса по режущим кромкам ковшей, м; r - плотность горной массы, т/м3; f - коэффициент разрыхления горной массы в ковшах); b=0,102 K1 (K1 - удельное усилие копания, линейное, Н/см; i - число промежуточных режущих кромок между соседними ковшами); c=K1×0,162×D×Smax (1 + i)×r1 - 232 Np (r1 - радиус закругления режущих кромок ковшей в плоскости периметра резания (черт. 2), м; Np - мощность привода роторного колеса, кВт);
Черт. 2 при заданном удельном усилии копания поверхностном Qтeop2= где KF - удельное поверхностное усилие копания, Н/см2. 3. Эффективную производительность (Qэ) в кубических метрах в час рассчитывают по формуле Qэ= где Kзаб - коэффициент забоя, характеризующий потери времени на выполнение вспомогательных технологических операций при отработке расчетного забоя, определяемый по формуле Kзаб= где Тэ - необходимое время непосредственной экскавации при отработке блока с производительностью Qтeop2, ч; Твс - расчетное время на выполнение операций при отработке блока (остановка и реверсирование механизма поворота в конце каждой стружки, переходы от стружки к стружке, от слоя к слою и от одного блока к другому), ч; Kу - коэффициент управления, характеризующий изменение фактической средней производительности экскавации по сравнению с теоретической и дополнительные потери времени из-за увеличения, по сравнению с расчетной, длительности вспомогательных технологических операций при отработке блока. Для ориентировочных расчетов значения коэффициента управления Kу равны: 0,75...0,85 - для экскаваторов, не оборудованных автоматической системой управления; 0,85...0,95 - для экскаваторов, оборудованных автоматической системой управления. Расчет при эксплуатации экскаватора Qэ=Vб/tб, (7) где Vб - объем блока, отработанного роторным экскаватором, м3; tб - время отработки блока, ч. Эксплуатационную производительность (Qэкс) в кубических метрах в час рассчитывают по формулам Qэ=Qэ×Kт.и, где Kт.и - коэффициент технического использования по РД 50-650; при эксплуатации экскаватора Qэ=Vб/tк, (7) где tк - календарный фонд времени за вычетом организационных простоев, периода перегонов роторного экскаватора из-за перестройки технологической схемы, а также периода не свойственных работ (перевалка, зачистка трассы и т.д.), ч. При работе роторного экскаватора в составе комплекса горно-транспортного оборудования календарный фонд времени определяют без учета всех простоев (аварийных, технологических, организационных и т.д.), связанных с другими машинами комплекса в часах. Список литературы 1. http://stroy-technics.ru/jekskavatory/ 2. Беркман И. Л. Универсальные одноковшовые строительные экскаваторы / И. Л. Беркман, А. В. Раннев, А. К. Рейш. — М., Машиностроение, 1977 г. 3. Краткий справочник машиниста экскаватора / под. ред. А. Ф. Яковлева, М. Машиностроение — 1972 г. 4. Экскаваторы и стреловые самоходные краны. Каталог справочник. – М.: АО «Машмир», 1998. 5. Баловнев В. Дорожно-строительные машины и комплексы – М.-Омск, СибАДИ, 2001. 6. Гальперин М.И., Домбровский Н.Г. Строительные машины: учебник для вузов. - 3-е изд., перераб. и доп. - М.: Высшая школа, 1980. - 344 с. |
 £
Qтeop1, (4)
£
Qтeop1, (4)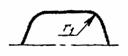
|
|
| 17.06.2012 |
| Большое обновление Большой Научной Библиотеки |
| 12.06.2012 |
| Конкурс в самом разгаре не пропустите Новости |
| 08.06.2012 |
| Мы проводим опрос, а также небольшой конкурс |
| 05.06.2012 |
| Сена дизайна и структуры сайта научной библиотеки |
| 04.06.2012 |
| Переезд на новый хостинг |
| 30.05.2012 |
| Работа над улучшением структуры сайта научной библиотеки |
| 27.05.2012 |
| Работа над новым дизайном сайта библиотеки |